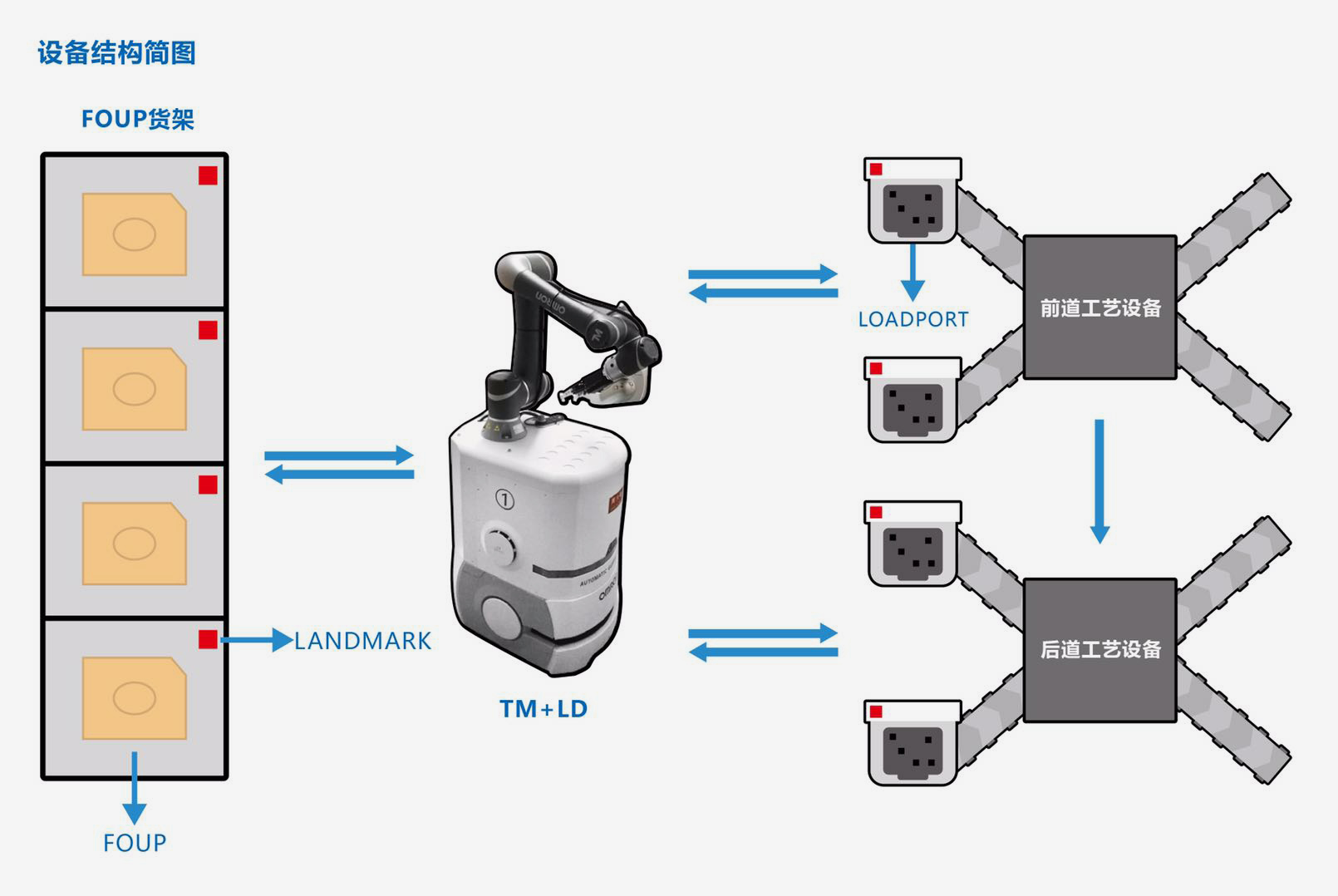
该设备主要实现半导体工厂中用于装硅片的Foup的运输工作,将前道工艺设备完成的部件至于LoadPort,再将LoadPort上的部件运输至对应的Foup货架。
目前装硅片的Foup运输环节是由人工完成的,不仅效率低下,而且常与人接触,容易产生灰尘。
通过导入欧姆龙自主移动机器人LD系列,配合协作机器人TM系列,实现了全自主的物料运输。
而如果TM相机视野增大,拍照距离变远的话,虽然可以保证拍到Landmark,但精度会很差,因此我们采用嵌套视觉的方式来拍Landmark。
通过VISION0709任务,对Landmark进行远距离、大范围的第一次拍照;识别到Landmark之后,机器人会向下移动到离Landmark更近一些的第二个拍照点再次拍照;识别之后,再次向下移动到最终的Landmark拍照位置,这样就保证拍照位置距离Landmark 10cm之内,保证识别精度和坐标精度。
协作机器人TM系列搭配自主移动机器人LD系列的应用解决方案,称作Mobile Manipulator(MOMA),通过TM强大的视觉功能,可以挑选和放置各类物品,并搬运至工厂的任何地方,使制造和材料处理变得更加灵活,整体效率大幅提升!